Any event partner that does events in schools will tell you that that the school Maintenance Team can make your event. I’ve done lots of events at lots of Brandywine School District schools. In every case the school’s Team has over delivered, they have made every event just a joy.
So when the head of STEM Education pitched to me “Come and do a session about Robots for the Maintenance Education Day”, I was all in. I was limited to 30 minutes so I had to be focused. With 16 people at a time, it was going to be a busy session. I need to find a way to get everyone engaged.
The plan:
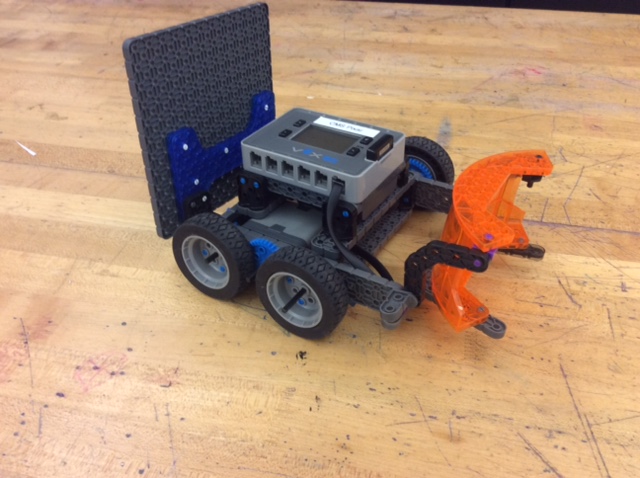
- Give each team of 4 a working drive base
- Play a practice match and see what the issues are with the robot
- Do a 10 min session of upgades
- Play a match
- Do a 5 minute session of upgrades
- Play a match
- Do a last 5 minute session of upgrades
- Do a final match
That leaves about 5 minutes to explain what competition robotics is, why we do it and what the roboteers get out of it. Let them do the plan, design, build, play iteration cycle three times. End with a 1 minute quick “What did you learn, did you have fun?” cycle around the room. VEXIQ robots are the clear choice since they go together and come apart quickly.
Since I literally have a suitcase full of VEXIQ robot parts and lots of them are the cool parts scavenged from the HEXBUG kits, that part was easy. Ed Burks from Claymont Elementary School donated 4 robots for the day and we were good to go.
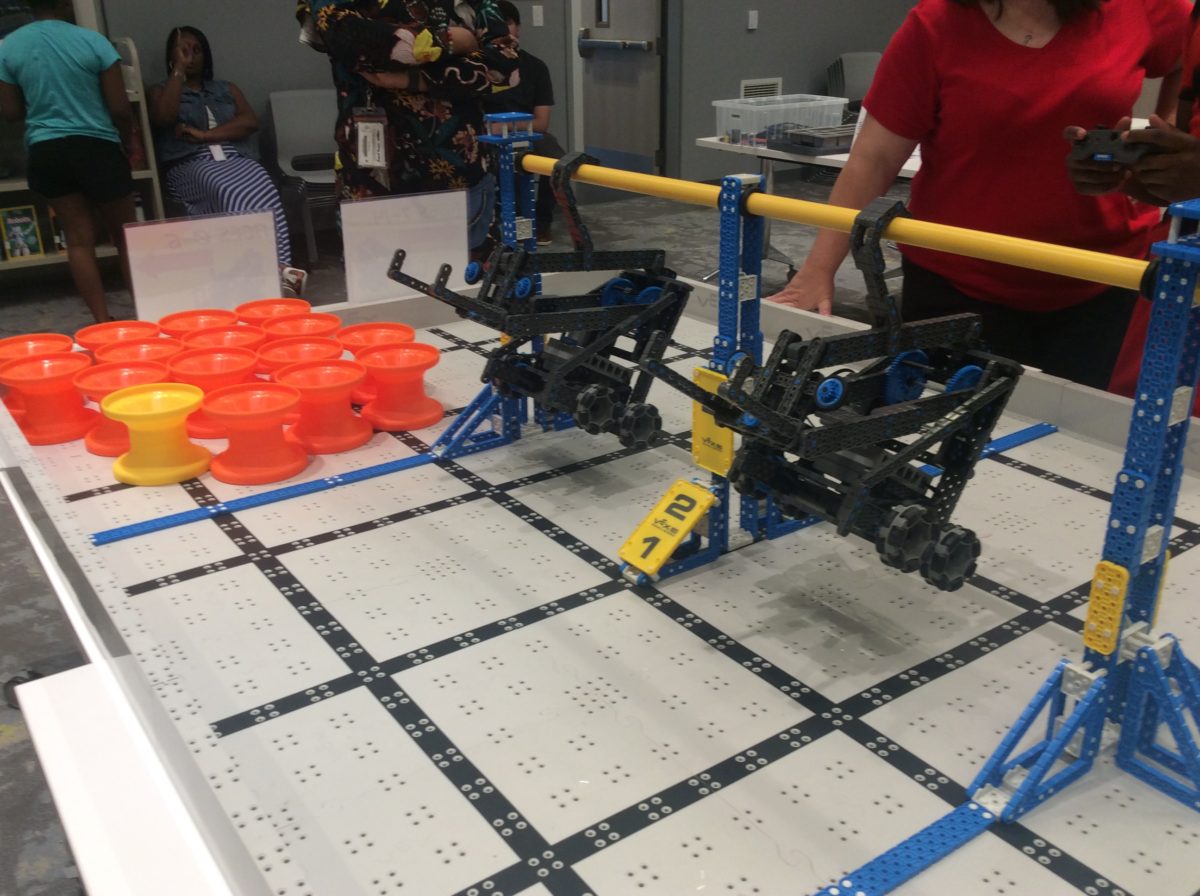
The game: Build a 5’x 5′ field. Across the middle put a line of alternating 6 orange and 6 blue hexballs (from the 2016-17 game). Two robots on a side, push your color hexballs to the far side of the field (need to be past the 6″ line). Most balls wins. So even a simple drive base can play the game. Rules were simple, here is how to score, it’s not battle bots, points awarded at the end.
The Day:
It was a blast!
We ran three sessions in the morning, with 14-16 people each session. For people seeing VEXIQ robots for the first time they did an amazing job of digging into the parts and coming up with bigger scoops / pushers to move balls across the field. Lots of cool designs.
In the last match of the day, the “Purple People Eaters”, named for their huge purple scoop, verified that the points were not counted to the end. They helped their partner score for the first 45 seconds, but at the 15 second mark, they dashed for the orange zone. They adjusted their scoop angle, slid along the wall and removed ALL the orange hexballs from scoring position. Final score Blue 4, Orange 0. Wow!
Lots of good design iterations, some good strategy, and everyone had fun. And everyone learned a lot about competition robotics!
Thanks to Talley Middle School and to Michelle Kutch for inviting me!